官方 Lanisky网站建设:企业、政府、学校网站建设、开发、代运营(广州18820090892,深圳18007555088,微信同号)
官方 丰业合作社:广东省示范社,全国合作收购荔枝、圣女果、番石榴等,体验式入园采摘0759-6905386,15360737081 )
未来几十年的太空探索将集中在海洋世界——尤其是土卫二、欧罗巴和土卫六。因为它们在数公里冰壳之下的液态海洋是地球以外最有可能孕育生命的地方。
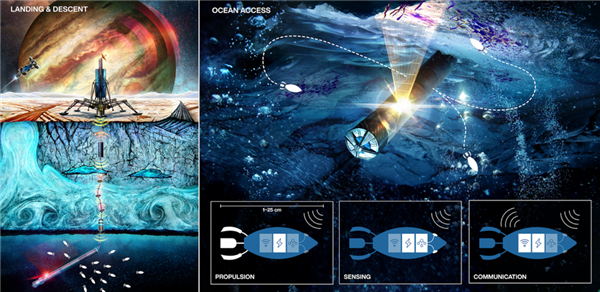
为了进入这些水生环境,美国宇航局正在开发和完善许多海洋进入任务概念,包括欧罗巴科学探索地下进入机制 (SESAME) 类热机械钻井机器人,以及更小的独立微型游泳机器人(SWIM)。
据了解,SWIM系统由厘米级3D打印游泳微型机器人组成,长度约12厘米,配备MEMS传感器,由微型执行器驱动,并通过超声波进行无线控制。
携带SWIM机器人的着陆器降落在卫星冰壳上后,会释放一个穿冰机器人,利用其核电池的热量融化一条穿过冰层通往下方海洋的隧道。一旦到达那里,穿冰机器人将释放大约50个SWIM机器人,开始独立探索寒冷的水域。
每个SWIM机器人都有自己的推进系统、机载计算系统和超声波通信系统,还配有简单的温度、盐度、酸度和压力传感器。此外,它们还将携带监测生物标志物(生命迹象)的化学传感器。
SWIM能够对SESAME机器人无法触及的海水进行主动采样,以及对所需海洋特性、宜居性指标和潜在生物标志物的时间和空间分布测量。这些能力共同将使科学家能够更好地描述/了解外星海洋的组成和 NASA 首次海洋访问任务的可居住性。
NASA计划在2024年执行的“欧罗巴快艇”任务中部署这些游泳机器人。